pvp
-
Постов
61 -
Зарегистрирован
-
Посещение
Тип контента
Профили
Форумы
События
Блоги
Новости
История модели
Отзывы и впечатления
Покупка
Ремонт
Всяко разно но полезно
Клубные мероприятия и проекты
Помощь при Дтп
Загрузки
Галерея
Весь контент pvp
-
Сам спросил сам отвечаю - IVDC - для адаптивного круиза и для адаптивной подвески, а IVDS - как обычный IVD с поддержкой троганья на сколне.
-
Люди, подскажите, пожалуйста! На просторах интернета можно найти блоки ABS с различными надписями на наклейках, а именно: IVD, либо IVDC, либо IVDS (может и ещё какие бывают - я не встречал пока что). Как я понимаю, IVD - это просто ESP, IVDC - это ESP + подвеска с регулируемыми амортизаторами, а что есть IVDS?
-
НЕ РЕКЛАМА. Позвонил сюда: http://ford-house.ru/, сказали, что про AISIN ATF-6004/6020 не знают. Сами льют либо Тойотовское (не расслышал какое), либо оригинальное фордовское. Оригинальное - по 900р/л. Дурацкий вопрос - так можно лить масло aisin в коробку aisin afw21? Полусинтетика не смущает? Оригинал ведь синтетика, да?
-
AndrewWhite, Опишите, пожалуйста, ваш комплект для установки АКК. А схемы электрические принципиальные можно у вас попросить?
-
А можно тебя попросить центральную конфигурацию сбросить, считанную ELMConfig'ом? Вдруг я чего недоконфигурировал, например.
-
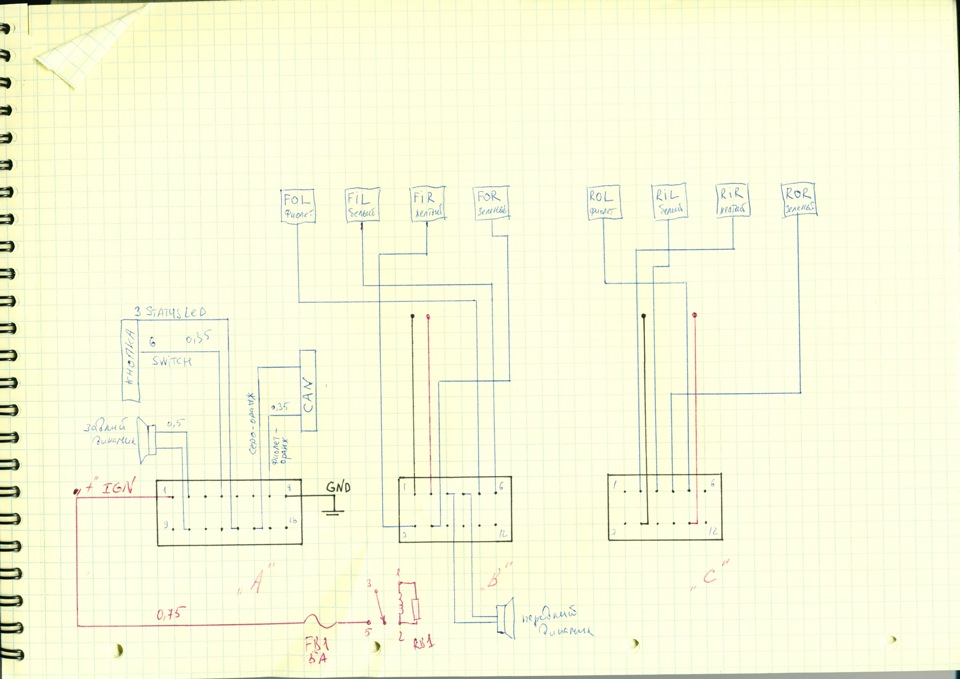
@IL 146, Как подключить-подсоединить - всё ясно, но меня интересовало (согласно вопросу из первого поста), как земля попадает на блок рисования линий! Моё мнение - по оплётке коаксиала из блау. Почему так - смотри выше (первый и второй посты).
-
А вот и не угадал! К сожалению, не приглушает Да, ещё забавный момент. Так получилось, что начал установку с задней части машины - сначала камеру заднего вида врезал, заьем модуль рисования установил, потом пищалку прикрутил заднюю, затем сконфигурировал - и - опа! Парктроники ошибку выдают (Пищат секунды три при включении, мигают кнопкой парков и потом не работают)! Кроме того, повисает ошибка передней пищалки. Оказывается, нужна обязятельно пищалка и передняя тоже. Ну установил и её тоже (блин, пришлось всю пластмассу под рулём откручивать http://adssupport.narod.ru/convers.html, так как у меня S-max). И после этого всё штатно заработало.
-
А голова 14-го года выпуска с видеовходом умеет? (Впрочем, сам скоро узнаю)
-
Сам спросил - сам отвечу - нагуглил на драйве вот что (https://www.drive2.ru/l/2464561):

-
Напомните, пожалуйста, что необходимо сделать при установке blau nx, чтобы парктроники пищали через свои пищаки (ведь блау не умеет ни пищать, ни приглушать звук, не так ли?). Сейчас установлена сонька, которая пищит и приглушает. Соответвенно, штатных пищалок пока не установлено. Говорят, что за приборкой разъём есть у всех для передней пищалки, а вот для задней (рядом с блоком парков) не нашёл. Уже нашёл Короче говоря, достаточно ли будет установить пищалки ну и сконфигурировать bcm? Или ещё нужно что-то с блоком парков делать (прошивать/конфигурировать)? Да, а на какие контакты блока парков вещать пищалки? Поделитесь схемкой, пожалуйста.
-
Спасибо. Написал ему в ЛС.
-
Конечно опытный читатель скажет - а корпус же блока рисования линий металлический и наверняка связан с общим? Да, внутри блока это действительно так. Но сам блок устанавливается в такую клетку из пластмассы, которая полностью изолирует его от шасси автомобиля. Или просто кинуть перемычку на кузов?
-
Помогите, пожалуйста, схемой соединений (из етиса) для S-max 2013. Просто кое-что смущает в жгуте электропроводки 9M2J-14D466. Данный жгут включается в разрыв мужду электропроводкой, идущей к блоку парков и самим блоком парков (бежевый и чёрный разъёмы). Также содержит в себе коаксиал для передачи видео в голову (серый разъём). А смущает следующее - отсутствие "общего" провода в колодке, подключаемой к блоку рисования линий (зелёный разъём). Присутсвуют только шина CAN (серо-оранжевый и фиолетово-оранжевый провода) и +U пит (синий провод). Неужели "общий" берётся с оплётки коаксиала, идущего в голову (блау)? Да, к разъёму типа Fire-Wire подключается сама камера заднего вида. Ну что за чертовщина? Всю голову (свою) уже сломал в поиске вразумительного ответа на свой вопрос. Спасибо.
-
Всё-таки решил вопрос неспортивно - приобрёл за недорого (около 3000 - 3500 руб. более года назад) BG9T-14A073-CK, да ещё полные дверные модули (чтобы было куда светодиод в зеркале повесить) (по 1000 - 1500 руб., кажется). То есть предыдущую модификацию блока перед CL. В чём разница с CL - не знаю, но после привязки (при помощи WDS), у меня всё работает, как и раньше. Ну и захотелось по-заводскому(то есть с арочными антеннами) с датчиками давления разобраться. Но, так как на тот момент уже был пропатчеван motral'ом, а также потому, что не потянул проводку на антенны обновременно с прокладкой CAN шины на радары, забил на это.
-
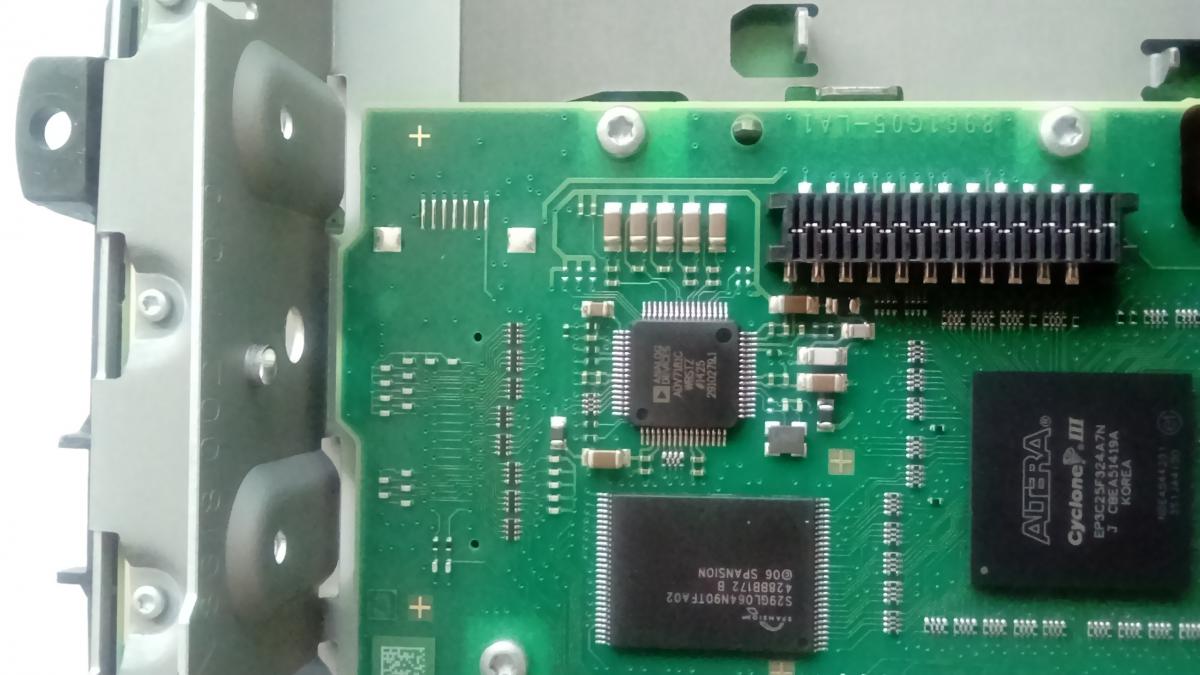
Видимо, речь идёт о 10-битном видео-АЦП ADV7181C (с обвязкой)? Если так, то в Москве его достать просто. Даже в попсовом Чипе-Дипе есть. [не реклама]. Вот даташит http://www.analog.com/media/en/technical-documentation/data-sheets/ADV7181C.pdf Типовая схема включения - на странице 19.
-
Прикуриватель. Обесточивается через пару минут после закрытия авто с брелка, например. У меня регистратор запитан от прикуривателя. Очень удобно - открыл машину - в прикуривателе появилось напряжение - запись началачь через 5 секунд. Закрыл машину - через пару минут прикуриватель обесточен - ещё через 30 секунд регистратор остановил запись и заснул сам.
-
Люди, а у кого-нибудь есть фотка антенны-активатора со стороны разъёма? Запостите, пожалуйста, сюда.
-
Один из интересующих меня вопросов был следующий: будет ли работать BLIS с BCM типа Bx? Ответ: "из коробки" (без аппаратных доработок) - нет. Так что конкретно для меня это было важно. А с системной точки зрения motral, конечно, прав. P.S. Как бы меня не забанили за оффтоп - в теме про конверс флудить про блок управления кузовом .
-
Но всё остальное, в том числе наличие/отсутствие примо-передатчика в блоке Bx, к сожалению, абсолютно не очевидно... (равно как и различия в прошивках для блоков CK и CL, например. И обновиться оазис не предложил). Спрашивал здесь на форуме, в теме про BCMi - никто не ответил... А теперь хоть на этот вопрос есть ответ.
-
Всего-то на одну больше, чему у четвёртого А подробности?
-
Не сочтите, пожалуйста, за оффтоп... Если быть точным до самого конца, то кан-шин в Моне/Эс-Максе/Галке аж ЧЕТЫРЕ, а именно: HS-CAN (500kbps), MS-CAN (125kbps), MM-CAN (125kbps) и ещё одна 3rd (третья, согласно схеме схеме системы BLIS) CAN (тоже 125kbps) - на ней висят только радары системы контроля мёртвых зон (BLIS). Вот эта последняя шина на диагностическую колодку не выведена, реализована в BCM. Процессор (R32С от Renesas), на котором построен BCM имеет три приёмомпередатчика CAN. И они все задействованы (под HS, MS и 3RD CAN). Приёмо-передатчик CAN канального уровня (TJA1042, такой же, кстати, используется и для HS-CAN) для 3RD CAN установлен только в полных (с буквой С) BCM. Радары успешно читаются с диагностического разъёма по шине MS-CAN, следовательно, на процессоре в BCM организован некий "шлюз" MS-CAN <-> 3RD-CAN. Так сделано, я думаю, из-за того, что во время работы радаров они генерируют нехилый трафик. Так вот, чтобы не засрать шину MS-CAN и сделали реализовали шлюз. P.S. Изложенные выше сображения были подкреплены практическими экспериментами и изысканиями.
-
Итак, есть некоторые новости по моему вопросу (напомню - интересует установка радаров блис на авто с блоком BG9T-14A073-BL. Радары блис вешаются на третью шину CAN, согласно приведённой в посте №108 на стр. 6 схеме). Сегодня вызвонил все интересующие меня цепи от разъёма до процессора!!! Так вот, в блоке BL не распаян соответсвующий приёмопередатчик CAN (по аналогии с HS-CAN используется, видимо, TJA1042), соответсвующая обвязка и терминирование плюс отдельный стабилизатор для питания приёмопередатчика. К счастью, всё подсматривается на распаянном приёмопередатчике. Однозначно, буду дорабатывать блок. Конечно, скажет пытливый читатель, а вдруг у блока CL прошивка другая? Это возможно, но в данном случае буду решать проблемы по мере их выявления. Так что первым делом доделаем аппаратную часть, а там - видно будет...
-
Всех с прошедшими и наступающим старым новым годом! Помогите, пожалуйста, со схемой BLIS на S-max (рестайл).
-
Какие именно? У меня в S-max стоит блок BG9T-14A073-BL. Для установки BLIS собираюсь приобрести BG9T-14A073-CK (за недорого). Вот здесь я описывал некоторые свои изыскания на тему третьей шины CAN, на которой и живут BLIS-радары.
-
А можете посмотреть или рассказать как это сделать? Спасибо. Это были лишь предположения. Не знал этого. спасибо. А вообще-то я верно предположил, что аппаратно блоки BG9T-14A073-CK и BG9T-14A073-CL идентичны?